
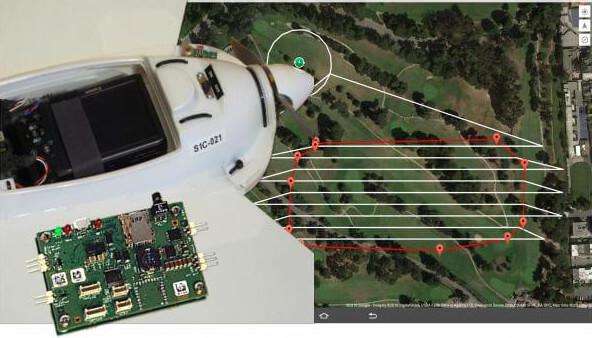
任务规划软件、带有摄像头的 Smartplanes Freya
无人机的有效载荷舱以及安装的 Septentrio AsteRx-m UAS GNSS 接收器的屏幕截图。
飞行
下图所示的飞行路线覆盖 7.5 公顷(18.53 英亩),飞行时间为 15 分钟。飞行期间拍摄的 143 张照片均带有 GNSS 独立模式位置地理标记。独立模式下的精度通常约为 1 至 4 米(3.28 至 13.13 英尺)。
如果机载接收器从附近的 GNSS 基站实时接收校正信息,它会使用更精确(厘米级)的 RTK 模式计算位置。
利用来自 GNSS 基站的必要数据,还可以在处理步骤中“离线”计算 RTK 定位。离线再处理无需无人机与基站之间的实时数据连接,从而简化了无人机的硬件设置并减少了有效负载。

瑞典 Smartplanes 执行勘测任务时无人机的飞行轨迹。
定位由 AsteRx-m UAS 接收器提供。
离线RTK
AsteRx 接收器通过对相机快门发出的脉冲信号进行时间戳记来记录拍摄照片的时间。它还在飞行过程中记录了双频 GNSS 测量结果。
地理标记软件使用接收器记录的 GNSS 数据,并将其与基站参考文件相结合,能够计算厘米级 RTK 位置,以对照片进行地理配准。然后,照片的 EXIF 数据将替换为更准确的 RTK 地理参考,以供图像处理使用。
现在照片上印有精确的时间和地点,就可以对其进行处理了。下面屏幕截图中的蓝色十字是用于确定最终精度和准确度的检查点的地面位置。它们不参与处理。
本示例详细介绍了 Pix4D 和 PhotoScan 的使用,但是也可以同样使用其他类似的图像处理工具。
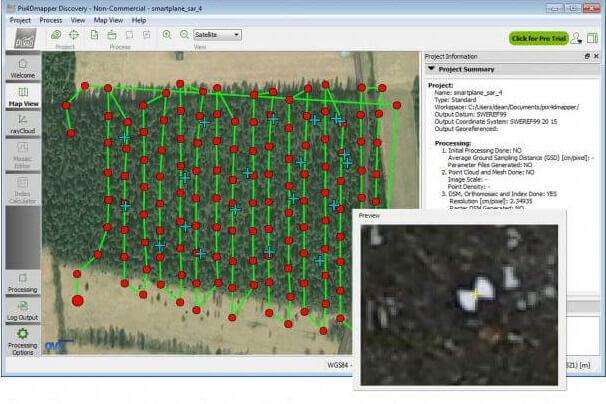
Pix4D图像处理软件。插图显示了其中一个检查点的可视地面标记。
您期望在地面上的准确度是多少?
本例中的照片是使用 Agisoft 的两种流行图像处理软件工具 Pix4D 和 PhotoScan 进行处理的。下面突出显示的值是来自各自报告的 3D-RMS 值。这些值是根据 20 个检查点的测量位置与使用图像处理软件计算出的位置之间的平方差之和计算得出的。
两种软件工具的 3D 精度均优于 3.5 厘米,其中高度 (Z) 是造成总误差的最大因素。这与人类测量员手动测量 20 个检查点中的每一个时通常能达到的精度相同。
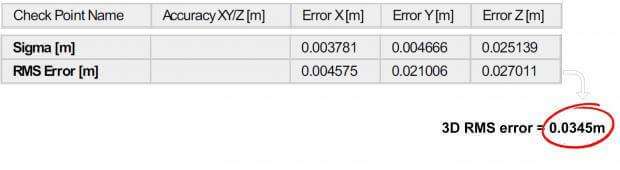
Pix4d-结果

Agisoft PhotoScan 结果
高分辨率航空照片与地理标记软件相结合,可通过紧凑型高端接收器模块对 RTK 位置进行地理配准,为地面厘米级测绘精度提供完整的输入。因此,对于测量区域内的所有地面点,只需一小部分时间即可达到与手动测量相同的精度。
https://www.septentrio.com/en/learn-more/insights/look-no-ground-control-points
电话: 025-85577685
地址:南京市江宁开发区诚信大道990号优尚天地3栋417室
企业微信

