自主海洋导航中最大的3个定位挑战

海上自治的趋势及其背后的全球定位系统技术
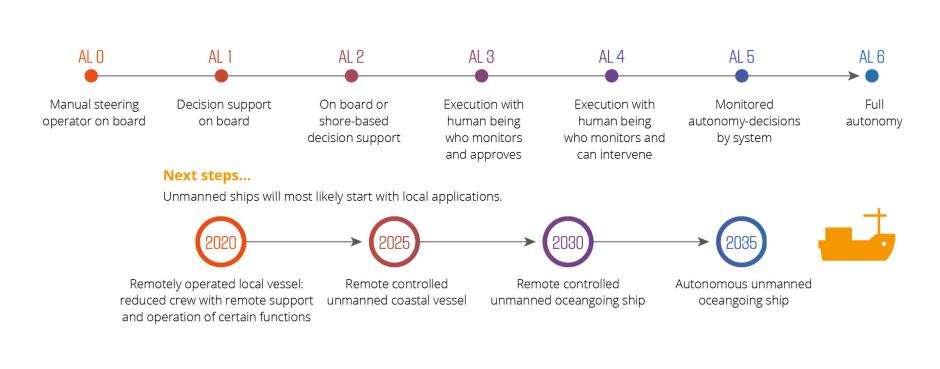
海运业正出现在公海和内陆的导航自动化趋势。劳埃德船级社预测,到2035年,海运业将转向完全独立于航海业和内陆船舶,时间表与汽车业相似。
图1:来自劳埃德登记册的船舶自主权演变预测和自主权水平(ALL)(见脚注1)。
全球定位系统在自主船舶的导航中发挥着关键作用,提供了定位信息,使船舶能够在港口周围安全航行,停留在预定路线上,并在目的港停靠。在内河航行中,船舶之间的距离可以在一个紧密的船闸空间内降至1米,因此需要有最高定位精度和可靠性的定位解决方案。
为什么要在内陆进行海洋自动化?
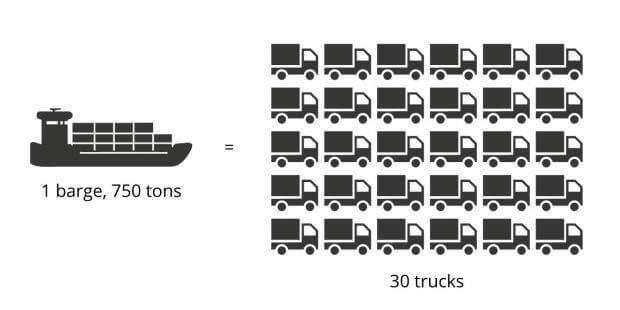
目前只有6%的内陆运输是通过水道进行的,而与铁路和公路运输相比,水运实际上更节能、更安全。优化路线和燃料效率,增加货运空间和节省人力资源,只是自动化帮助内陆游艇所有者增加利润,在运输市场获得竞争优势的方式之一。
图2:水运,一种节省燃料的货运方式(见脚注2)
在远程操作中心的船长负责监测自主驳船,同时监测数艘无人驾驶船只的航行情况,如果需要,可以进行干预,以接管导航控制。
与海上运输不同的是,内陆驳船需要在通过船闸、桥下和城市附近地区的狭窄水道上航行,所有这些都为准确和持续的定位解决方案提出了一些工程挑战。
内陆海洋自动化的三大定位挑战
1:在存在极端多径情况下的亚标尺精度
狭窄的内河航道、船闸系统和港口需要船只以最精确的方式航行,有时只需在经过的船只之间留下几米。对接和脱离对接的演习需要远程船长的特别注意,谁监测的过程。为了正确地判断情况,如果需要远程操纵船舶,远程船长需要知道船舶的精确位置降至亚标度。
多径误差是由于全球定位系统卫星信号反射到附近的建筑物,如锁墙、桥梁、建筑物和其他船只。多径延迟全球定位系统信号,降低了船舶位置的准确性和可靠性。另一个影响定位及其精度的因素是全球定位系统卫星的能见度。当船降至船闸时,船闸墙将船到全球定位系统卫星的视线阻挡,导致用于定位计算的信息丢失。
溶解物 *通过接收信号校正(通常称为:
rtk更正 -从当地的基站或通过手机连接。其他更正,如SBA或购买力平价,提供了从地球静止卫星上进行的次标尺定位和使用校正。
内置多路径减缓算法,如七重奏的
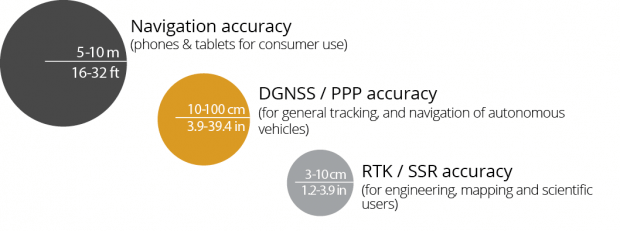
阿普梅+ 能够检测和最小化多径错误的影响。跟踪多个信号频率和多个全球导航卫星系统卫星群确保了冗余,从而使全球导航卫星系统接收器总是有足够的测量数据来提供准确的位置:全球定位系统、全球轨道导航卫星系统、伽利略、北斗是四个主要的定位系统星座。
图3:不同水平的定位精度取决于该接收器使用的全球导航卫星系统接收器和校正。
2:干扰:干扰和欺骗
干扰对小型水道造成的挑战比在公海要大得多。干扰是指无线电波、蜂窝通信线路或
嗡嗡声干扰器 ,是司机为避免道路收费而使用的干扰装置。
非故意干扰 也可能是由于船上的各种设备,如雷达、无线电、天线和卫星调制解调器。干扰造成的干扰降低了位置的精确度,甚至会造成GPS定位在干扰源周围数百米半径内的损失。
当干扰在GPS频带上造成随机噪声时,欺骗用错误的位置信息取代卫星发送的位置信息。欺骗装置可能会被用来扰乱船只的轨迹,使其容易被盗窃甚至劫持。
溶解物 ::干扰减缓算法,如七重奏的
高级干扰减缓确保在面临干扰或欺骗时的可靠定位。他们识别干扰频率,并将其排除在他们的位置计算之外。图形频谱分析器帮助评估干扰频率和识别干扰源。
3:船只管制所需的可靠船头资料
船头是船在水中的方位,由于水流和风的作用,可能不同于速度矢量。只有获得精确的船头信息,远程船长才能在地图软件中想象出船只的全部长度。传统的磁指南针解决方案对该地区的大型金属物体很敏感,并可能受到船闸、桥梁以及其他经过附近的船只的影响。更先进的陀螺仪解决方案也是可用的,而且通常更可靠,但价格太高,是小型驳船自动化项目的组成部分。
溶解物 :船上的两个天线相距几米。一个双频全球导航卫星系统接收器使用精确的天线定位信息来确定下降到0.01°的方位角。
用户故事:
西法尔 是一家比利时公司,它开拓了货运船自动化技术,并提供无人驾驶游艇监测服务。西法尔有一个集成的七重音双天线,多频率,多星座 收信人 进入他们的自主船只技术,为船只的监测和控制提供次标尺定位。该接收器的坚固的外壳是理想的恶劣的室外海洋环境。双天线的设置提供了精确的方向信息和可靠的定位.
西法尔的独立海运船,七架全球导航卫星系统安装在里面。
https://www.septentrio.com/en/learn-more/insights/top-3-positioning-challenges-autonomous-marine-navigation